L’analyse objective de la démarche devient un outil essentiel en physiothérapie et rééducation canine. Combiner des mesures statiques et dynamiques permet souvent d’obtenir une vision plus complète, mais il arrive que les résultats semblent contradictoires.
Le cas de Freddie — un patient suivi sur le long terme après une hémilaminectomie T13–L2 — illustre parfaitement comment les schémas de charge statiques et les données de locomotion dynamique peuvent différer, et pourquoi ces différences ne constituent pas des erreurs, mais des informations cliniques précieuses.
Dans cet article, nous passons en revue l’évaluation de Freddie au Splash Paws Canine Hydrotherapy & Physiotherapy Centre et expliquons étape par étape pourquoi ses données statiques et dynamiques « racontent des histoires différentes »… et pourquoi les deux sont exactes.
Contexte du cas : Pourquoi Freddie a été évalué

Freddie est suivi au centre depuis son intervention chirurgicale sur la colonne vertébrale en 2024. Lors d’une évaluation de routine, le praticien a observé :
• Une nouvelle perte musculaire sur le membre antérieur et postérieur droit.
• Une raideur progressive, surtout du côté droit.
• Une hypertonicité au niveau des muscles du cou, thoraciques et lombaires.
• Des retards proprioceptifs dans les deux membres postérieurs.
Pour mieux comprendre ces changements, une évaluation combinée de la démarche statique (Stance Analyzer) et dynamique (Tendiboots™) a été recommandée.
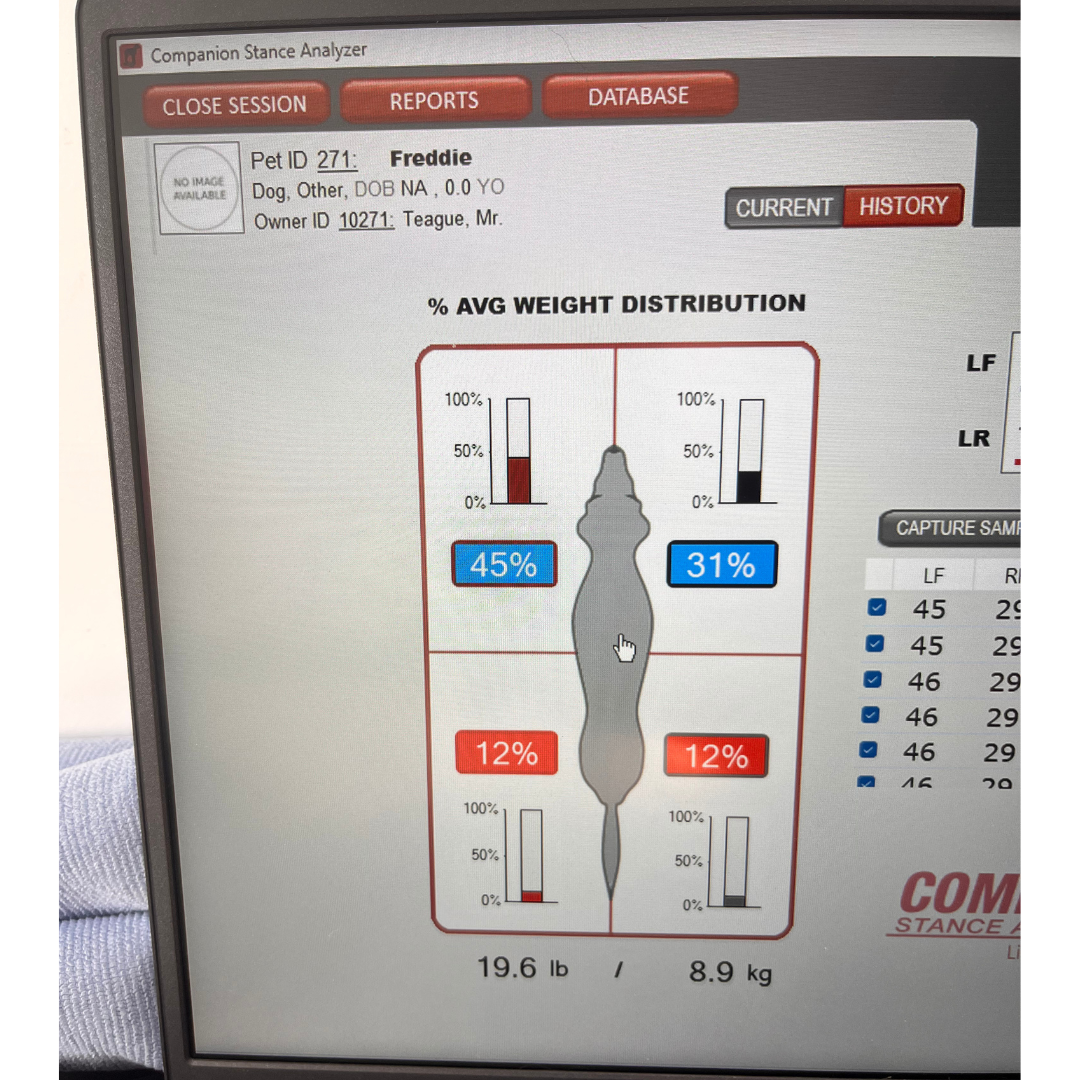
Analyse statique (Stance Analyzer) : ce que montre Freddie au repos
Répartition du poids en statique :
• Membre antérieur gauche (LF) : 45 % (très élevé)
• Membre antérieur droit (RF) : 31 %
• Membre postérieur gauche (LH) : 12 %
• Membre postérieur droit (RH) : 12 %
L’interprétation de l’équipe de ces données est que Freddie surcharge considérablement son membre antérieur gauche, décharge également ses deux membres postérieurs et utilise son membre antérieur gauche comme un « pilier » pour stabiliser son corps.
Au repos, ce schéma suggère qu’il trouve le membre antérieur gauche plus confortable que le côté droit.
Sur la seule base de ces chiffres, les professionnels pourraient conclure que le membre antérieur gauche est fort et indolore, et que le problème se situe du côté droit.
Cependant, c’est précisément là que se révèle la limite d’une analyse statique seule : elle peut être trompeuse.

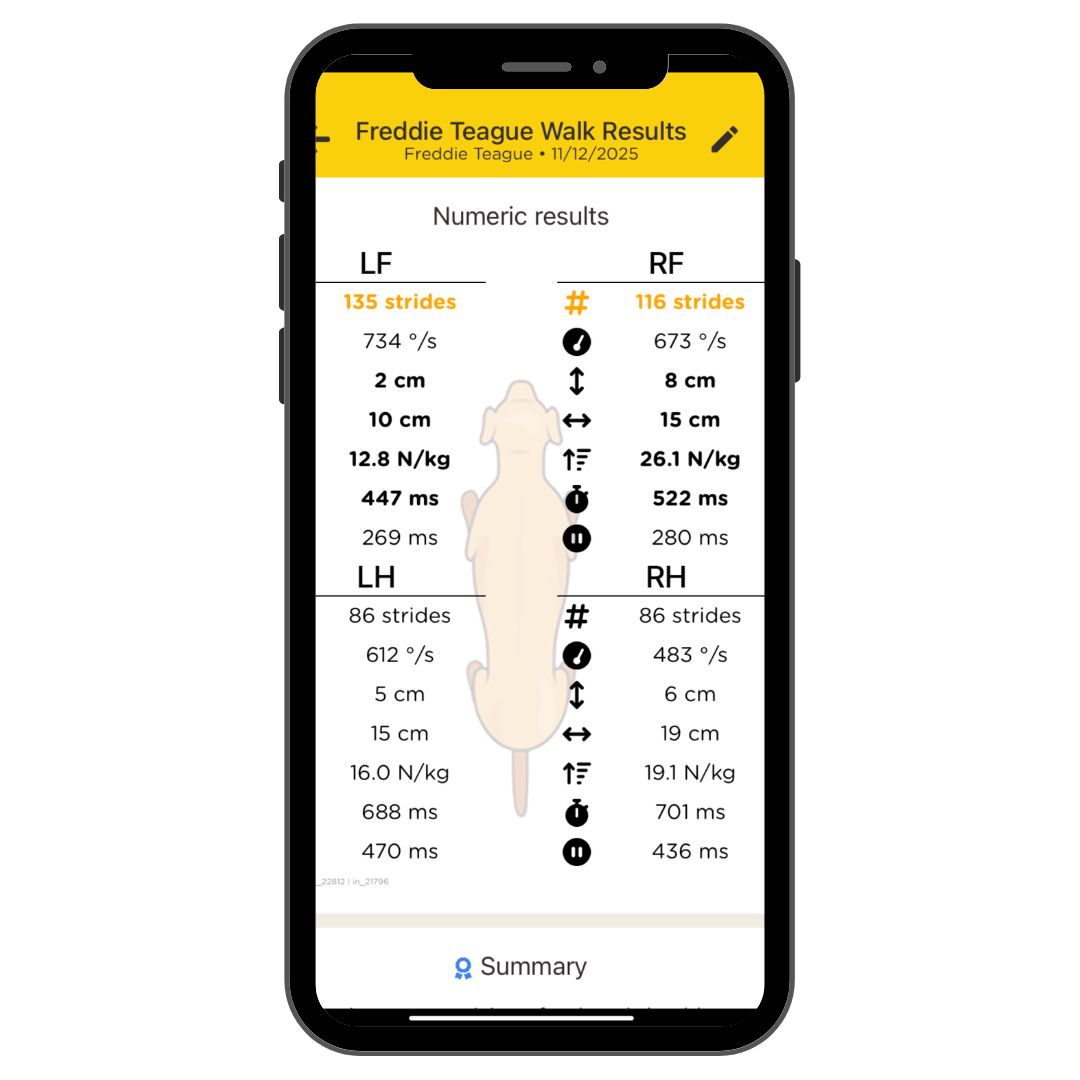
Analyse dynamique (Tendiboots™) : Ce que montre Freddie en mouvement
Lorsque Freddie commence à se déplacer, la situation change radicalement.
Membres antérieurs – Résultats Tendiboots™
Membre antérieur gauche (LF) vs Membre antérieur droit (RF)
• Hauteur de foulée : 2 cm vs 8 cm
• Longueur de foulée : 10 cm vs 15 cm
• Charge maximale (N/kg) : 12,8 vs 26,1
• Durée de foulée : 447 ms vs 522 ms
L’interprétation des données dynamiques montre que le membre antérieur gauche présente une amplitude de mouvement plus faible, des pas plus courts, une charge significativement réduite et une pose plus précoce (durée de foulée plus courte).
Ce sont des schémas classiques d’évitement dynamique liés à l’inconfort ou à la douleur.
En dynamique, il semble que, même si Freddie repose fortement sur son membre antérieur gauche au repos, il n’a pas envie de l’utiliser pendant le mouvement.
Membres postérieurs : Accord entre les données statiques et dynamiques
De manière intéressante, les mesures statiques (Stance Analyzer) et dynamiques (Tendiboots™) s’accordent pour montrer que les membres postérieurs de Freddie sont symétriques, c’est-à-dire que les membres postérieurs gauche et droit supportent le poids de manière équilibrée l’un par rapport à l’autre. Dans l’analyse statique, les membres postérieurs étaient globalement sous-chargés (12 % chacun au lieu des 20 % attendus), mais les deux côtés partageaient le poids de manière égale. Les mesures dynamiques de Tendiboots™ ont confirmé cette symétrie en mouvement, avec seulement de légères différences dans la hauteur de pas, la longueur de pas et la charge maximale entre les membres postérieurs gauche et droit.
Que peut-on en conclure ? Même si les membres postérieurs sont sous-chargés par rapport à la normale, cette symétrie indique que Freddie ne favorise pas un membre postérieur par rapport à l’autre. Cette sous-charge est probablement un mécanisme compensatoire pour le malaise et l’évitement dynamique observés au niveau des membres antérieurs. En d’autres termes, bien que les membres postérieurs ne supportent pas leur part de poids attendue, les deux fonctionnent de manière équilibrée l’un par rapport à l’autre, contribuant à la stabilité globale et à la qualité de la démarche.
Cette concordance entre les données statiques et dynamiques souligne un point important : les contradictions apparentes entre les mesures de posture et de marche sont souvent cliniquement significatives, reflétant des stratégies de compensation posturale plutôt que des erreurs de mesure. Pour Freddie, cela montre que les interventions ne doivent pas seulement se concentrer sur l’inconfort des membres antérieurs, mais aussi viser à augmenter progressivement l’engagement des membres postérieurs afin de restaurer une répartition du poids plus naturelle.
Pourquoi les données statiques et dynamiques peuvent être contradictoires
Un membre peut être surchargé au repos et sous-utilisé en mouvement.
Cela se produit lorsque :
1. Le membre est stable et confortable en posture statique.
Le chien peut y reposer son poids sans déclencher de douleur.
2. Mais le mouvement de ce même membre devient inconfortable ou douloureux.
La douleur apparaît lorsque :
• L’articulation se fléchit ou s’étend
• Les muscles se contractent
• Les tendons glissent
• Le membre supporte une charge dynamique
Ainsi :
• En statique : le chien s’appuie sur ce membre
• En dynamique : le chien évite de l’utiliser
Ceci est particulièrement fréquent dans :
• Les tendinopathies de l’épaule
• L’arthrite du coude
• Les douleurs cervicales irradiant vers le membre antérieur
• Les points trigger myofasciaux
• Les compensations post-chirurgicales
• Les habitudes de mouvement asymétriques chroniques
Les muscles cervicaux et thoraciques hypertoniques de Freddie correspondent parfaitement à ce schéma.

Ce que l’analyse dynamique révèle par rapport à l’analyse statique
Les outils statiques mesurent le confort au repos.
Ils sont utiles pour :
• Les compensations posturales
• Le membre préféré pour supporter le poids
• Les habitudes chroniques
Les outils dynamiques (comme Tendiboots™) mesurent ce que le chien est disposé ou non à faire en mouvement.
Ils révèlent :
• La douleur déclenchée par le mouvement
• Les déficits fonctionnels
• La réduction de l’amplitude de mouvement
• La charge asymétrique pendant la locomotion
Le cas de Freddie illustre parfaitement que les mesures statiques et dynamiques peuvent raconter des histoires différentes. Les deux sont exactes, mais elles reflètent des aspects différents de la démarche et de la fonction du chien.


Interprétation Clinique Finale
Freddie semble surcharger le membre antérieur gauche en posture statique, car il lui procure de la stabilité et semble confortable au repos. Cependant, il semble sous-utiliser ce même membre en mouvement dynamique, car le déplacement déclenche de l’inconfort.
Ce schéma explique :
• Les modifications musculaires observées précédemment
• La raideur progressive
• Le décalage entre la démarche visuelle et la posture au repos
Cela souligne également pourquoi l’analyse objective de la démarche est essentielle ; l’évaluation visuelle seule ne peut pas capturer cette dualité.
Le mot des professionnels :
« Lors de l’analyse de la posture de Freddie, il apparaît qu’il surcharge et surutilise son membre antérieur gauche. Cela contraste avec ce qui a été observé lors de ses mouvements dynamiques, où il montre une charge réduite et une sous-utilisation de ce membre. Le poids accru supporté par ce membre en posture statique est susceptible de rendre le membre inconfortable, entraînant cette sous-utilisation. Cette charge supplémentaire augmente la pression et provoque des tensions au niveau des articulations et des structures molles environnantes, contribuant ainsi à une réduction de la hauteur de foulée, de la longueur de foulée et de la durée de foulée sur ce membre, car il éprouve probablement de l’inconfort lorsqu’il essaie de l’utiliser correctement. »
Emmy Figg & Ellie Bridges, spécialisées en hydrothérapie et physiothérapie à Splash Paws Centre.
Plan thérapeutique issu de l’analyse
L’équipe soignante a décidé de :
• Réduire la surcharge sur le membre antérieur gauche
• Améliorer l’engagement des autres membres
• Introduire une physiothérapie ciblée (massage, laser, exercices contrôlés)
• Mettre en place un plan de gestion à domicile (promenades à rythme lent, échauffement, activité en laisse)
Cette approche combinée répond directement au déficit fonctionnel mis en évidence par l’analyse dynamique.
Conclusion
Le cas de Freddie démontre pourquoi l’analyse objective de la démarche doit inclure à la fois des mesures statiques et dynamiques.
Ce qui semble contradictoire à première vue est en réalité :
• Cliniquement logique
• Physiologiquement attendu
• Très informatif
Les données statiques montrent comment le chien répartit son poids au repos.
Les données dynamiques révèlent comment et pourquoi le chien évite d’utiliser certains membres en mouvement.
Ensemble, ces outils offrent une vision complète et permettent de planifier des thérapies plus précises et d’améliorer les résultats de rééducation.